Kinematics and Dexterity:
LEAP hand demonstrates side to side dexterity in both the finger up and finger down configuration.
This is thanks to its universal abduction-adduction mechanism.
Cost
LEAP Hand costs under $2000 and can be assembled in under three hours using only common hand tools.
Sim2Real Pipeline using Isaac Gym
Open-source and available here
Also check out our followup work: Dexterous Functional Grasping
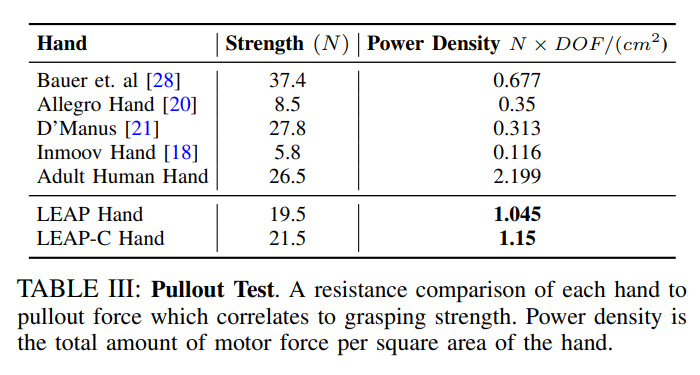
Strength
LEAP Hand is one of the strongest robotic hands available today
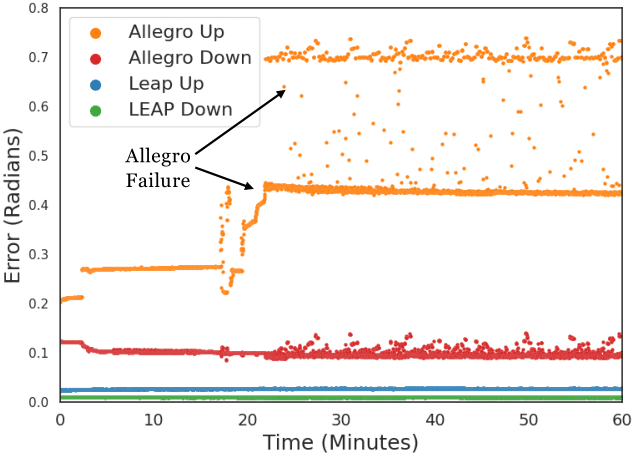
Robustness
LEAP Hand can accurately complete repeated motions without overheating
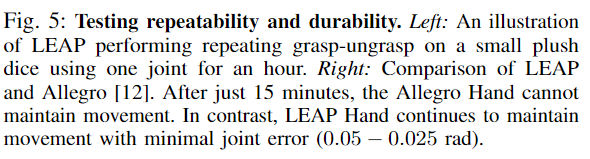
Human-like Versatility
LEAP Hand can grasp a wide variety of objects easily
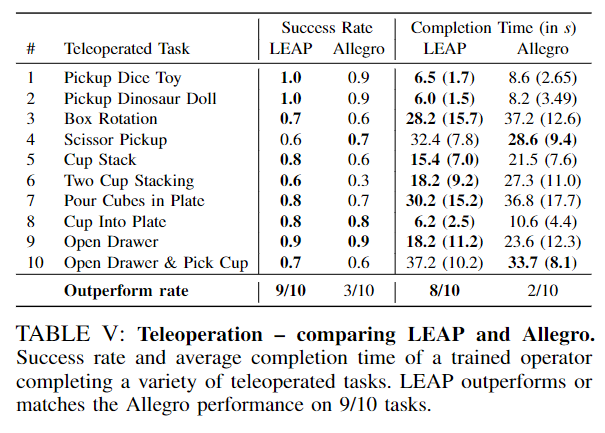
Teleoperation from Uncalibrated Human Video
Behavior Cloning with Internet Videos

Demo:
Our recent live demo at RSS 2023, thanks Aleksei Petrenko for the video!